






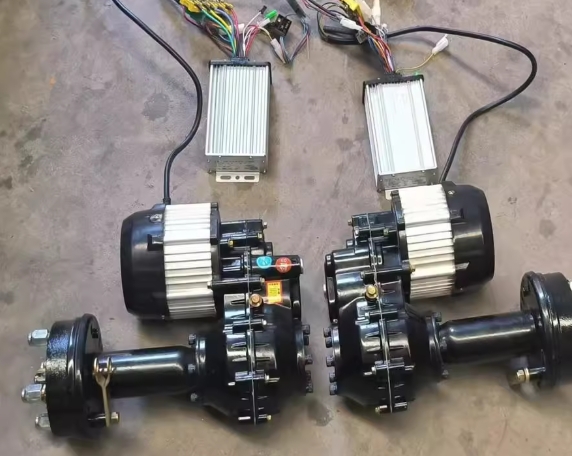

















How to choose a motor controller with matching power?
The motor controller is an integrated circuit that actively works to control the motor to work according to the set direction, speed, and response time.
In electric vehicles, the function of the motor controller is to convert the electric energy stored in the power battery into the electric energy required to drive the motor according to instructions such as gear position, accelerator, brake, etc., to control the start-up operation, forward and backward speed, and hill climbing of the electric vehicle. Driving conditions such as strength may help electric vehicles brake and store part of the braking energy in the power battery. It is one of the key components of electric vehicles.

Below we introduce how to choose a matching motor controller:
(1) Select a controller that matches the motor type.
For example, AC asynchronous, permanent magnet synchronous, DC brushed, DC brushless, square wave or sine wave, with Hall or without Hall, etc.

(2) Check the rated power marked on the motor.
Choose a motor controller with the same rated power to match. For example, if the motor has a nominal rated power of 3KW and a voltage of 72V, choose a motor controller with a rated power of 3KW and a voltage of 72V.

(3) Match the motor parameters.
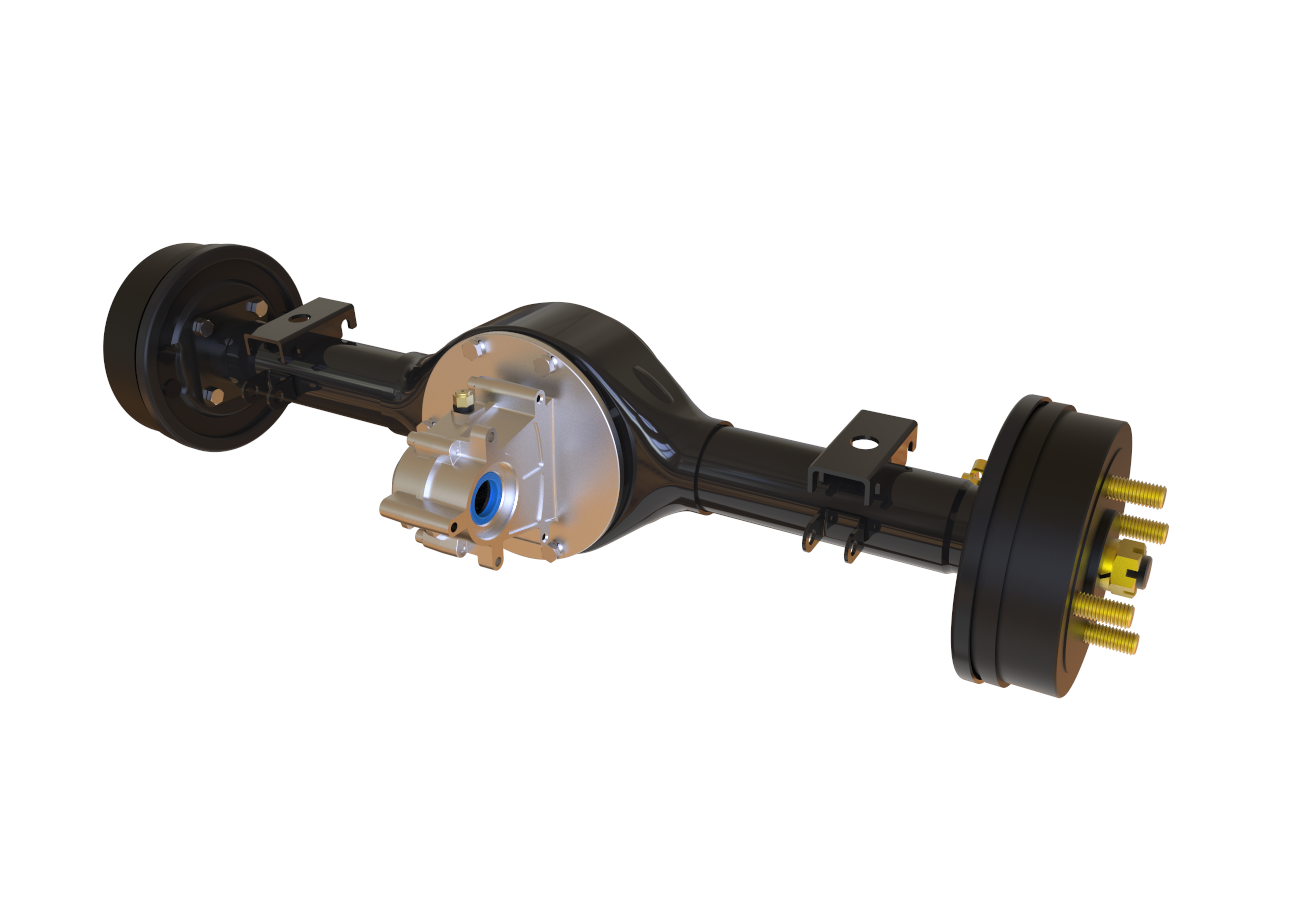
Taking an AC asynchronous motor as an example, check the number of teeth of the motor encoder and the direction of the wiring harness port arrangement. For example, if the number of teeth of a general motor encoder is 48 or 64, and the wiring harness port arrangement is +-AB or +BA-, the controller must select the phase. corresponding.

(4) Confirm the wiring port definition.
Taking the AC asynchronous motor as an example, first confirm the definition of the nine-core interface (the rightmost interface in the figure above), and then confirm the definitions of other communication interfaces.
Now that we know how to choose a controller, let's talk about what impact it will have on the motor if the power of the controller is too small or too large?
Let’s talk about the problem of low controller power first. For example, the maximum output power of a 60V motor is 2KW, but the maximum output power of a 60V controller is only 800W.
The maximum average current of the 60V 800W controller is 13.3A. The software sets the phase current protection value when the motor is blocked to be 3 times the average current, that is, the phase current protection value is 40A. The maximum average current of a 60V 2KW motor is 33.3. Assume that the phase current protection value of the matching motor controller is also set to 3 times the average current, which is 100A. If an 800W controller is used with a 2KW motor, the controller is equivalent to a small horse pulling a large cart. The controller has insufficient power, and the controller enters high temperature protection due to power tube and heat dissipation problems.
Finally, if the power of the selected controller is too large, the motor output phase current will be greater than the maximum bearing capacity of the motor when the motor operates under a large load. Short-term use with light load will generally not cause damage to the motor, but long-term operation with a large load will cause the motor to seriously heat up, damage the Hall sensor inside the motor, and even burn out the motor stator winding.
 XINDA
XINDA