























Why is it not recommended to use belt drive for large motors?
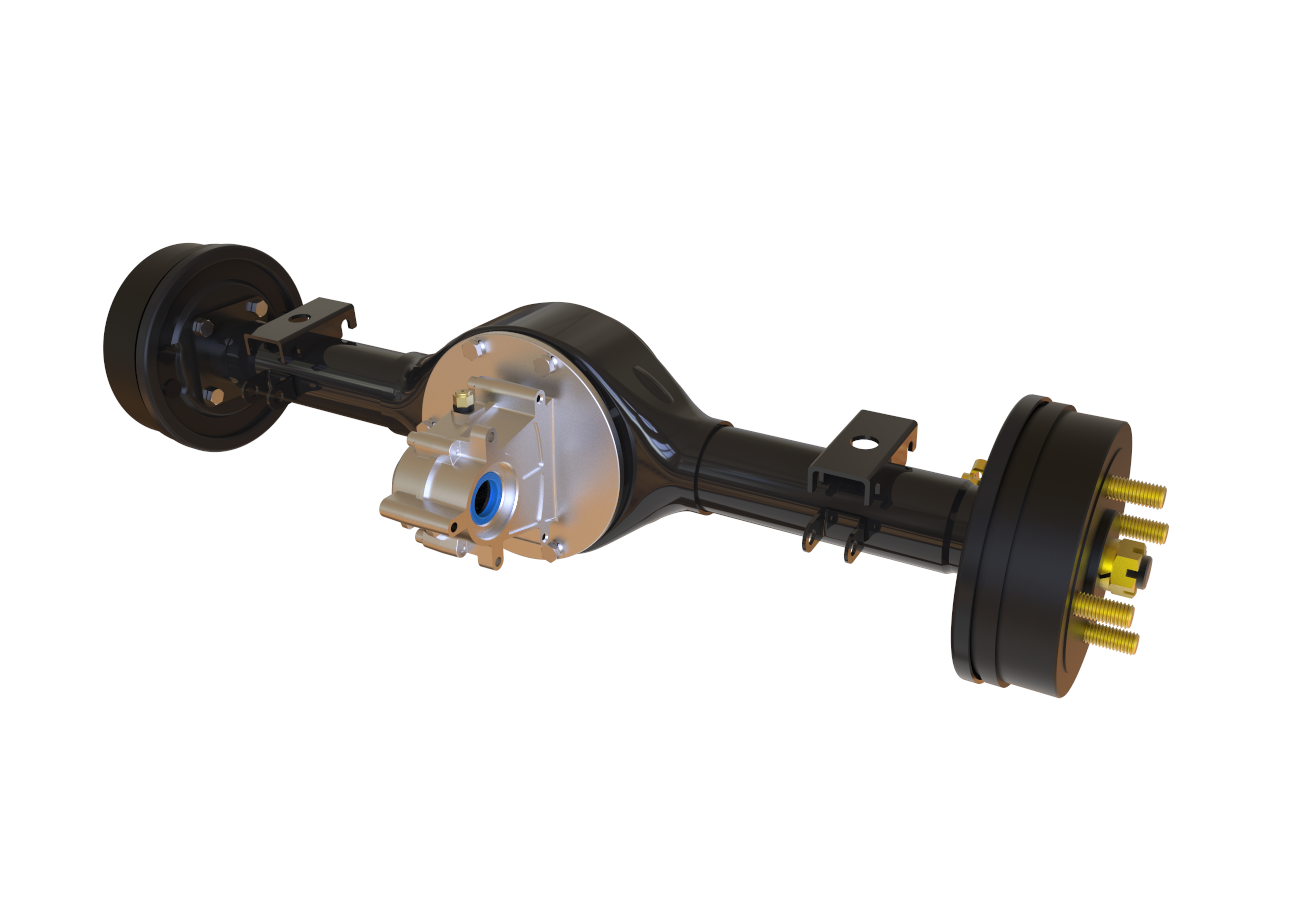
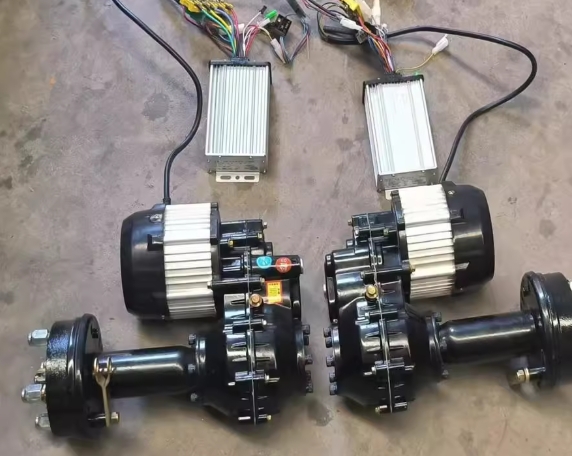
If you are interested, you can look through the operating and maintenance instructions of the motor products. Most of the instructions will put forward specific requirements for the docking method between the motor and the equipment. It is necessary to ensure that the motor and the equipment are coaxial, and to try to reduce the radial force perpendicular to the axis of the shaft. Therefore, for the transmission of the motor, it is more recommended to use a coupling instead of belt drive. Especially for high-power motors, belt drive will cause unnecessary shaft breakage problems due to factors such as excessive belt tightness and excessive pulley diameter.

In order to avoid the problem of motor shaft breakage, motor manufacturers will carry out necessary control on the material quality, processing technology, and shaft design of the motor shaft. However, for the users of the motor, it is necessary to communicate with the motor manufacturer for the specific installation.
If the same problem occurs on the same product, or the same problem only occurs on the same customer, we need to conduct a full analysis of such problems and solve the substantive problems through in-depth communication between the supply and demand sides.
When selecting an electric motor as a power machine, the primary consideration is determining the motor type and specifications. Choosing the motor type requires considering the machine's load characteristics, production process requirements, operating environment, and grid power supply conditions. The primary principle for determining motor specifications is to verify the motor's heat generation, starting torque, and overload torque based on the production process and load conditions. If the production process does not require speed adjustment, an AC motor should be considered first. If the load is stable, a standard squirrel-cage asynchronous motor can be selected. If the machine needs to start under heavy load, a squirrel-cage asynchronous motor with high starting torque or a wound-rotor asynchronous motor can be selected. Many machines require speed adjustment. Some, such as machine tools, only require a few speed levels. In this case, a multi-speed AC asynchronous motor can be used. If higher speed adjustment requirements are required, a separately excited DC motor should be used.
Electric motors are classified into two types: direct starting and reduced voltage starting. For squirrel-cage asynchronous motors, direct starting is preferred. However, with direct starting, the starting current is typically 4 to 7 times the rated current, while the starting torque is only 0.8 to 1.5 times the rated torque. Due to the high starting current, the grid capacity must be considered.
There are three methods for reduced-voltage starting: ● Resistor or reactor step-down: During starting, a resistor or reactor is connected in series with the stator winding and then short-circuited after starting. This method reduces the starting current to 1/K, but the starting torque is reduced to 1/K². ● Star-delta step-down: During starting, the stator winding is temporarily connected in star, then changed to delta after starting. This method is only suitable for motors with delta stator windings during normal operation. It reduces the grid current to 1/3 of that of direct-on-line starting, and the starting torque is also reduced to 1/3 accordingly. ● Autotransformer step-down: During starting, the motor is supplied with power through an autotransformer, reducing the motor voltage to 1/K of the rated voltage. After starting, the autotransformer is disconnected, and the motor is connected directly to the grid. Using this method, the grid current and torque during starting are both reduced to 1/K² of those of direct-on-line starting.
Reduced-voltage starting is only suitable for starting light loads. If both limiting the starting current and achieving a high starting torque are desired, a wound-rotor asynchronous motor must be used. A starting resistor must be connected in series with the rotor winding circuit, and the resistor is gradually removed during the starting process. To simplify starting equipment and improve starting characteristics, a frequency-sensitive varistor is often used instead of a starting varistor. For DC motors, direct starting is generally not permitted except for small-capacity ones. To limit the current, a starting resistor must be connected to the armature circuit.

 XINDA
XINDA