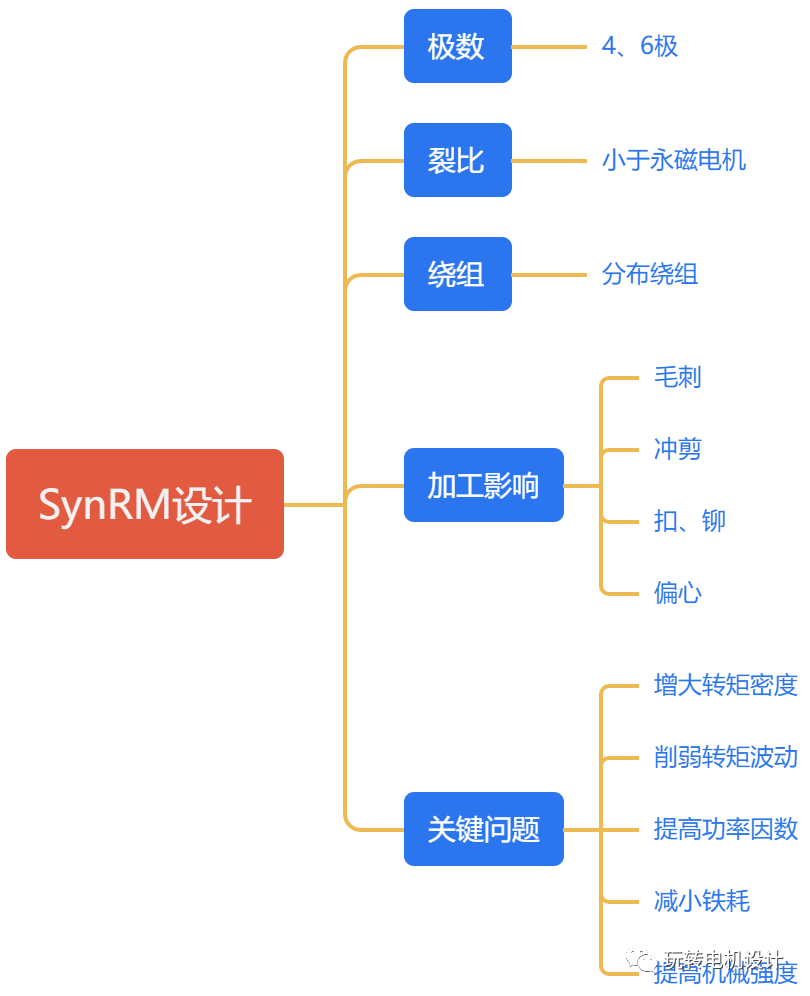
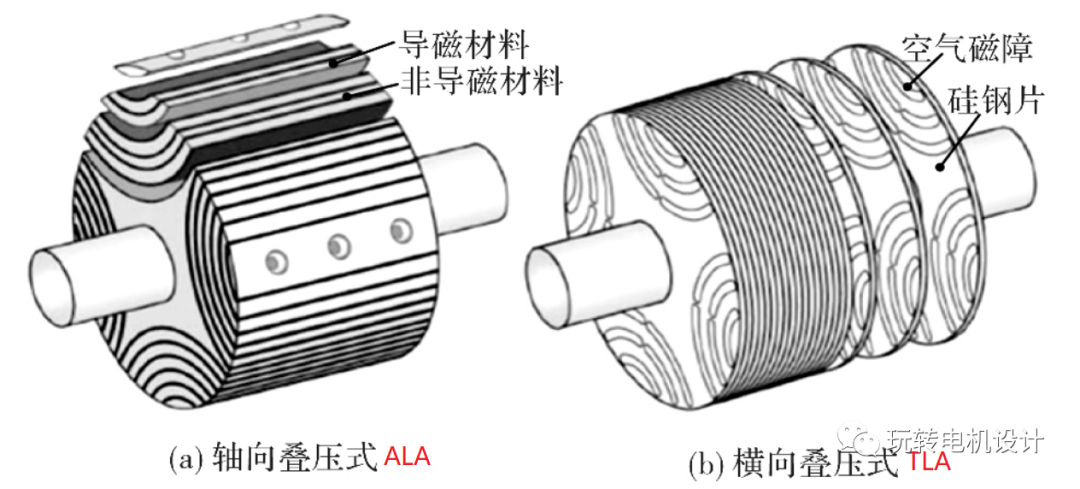
Synchronous Reluctance Motor Structure The rotor structures of synchronous reluctance motors currently studied are mainly two types in the above figure: axially laminated (ALA) and transversely laminated (TLA), also known as the third-generation synchronous reluctance motor structure. Among them, the TLA structure has better manufacturability and is a hot research topic at present.Number of pole pairsAs the number of pole pairs increases, the salient pole ratio of the motor decreases and the power factor decreases, so the design of synchronous reluctance motors usually chooses a smaller number of pole pairs . However, too small number of pole pairs will lead to longer end winding and smaller slot area, increasing the volume of the motor and reducing the output torque. Considering the torque density, power factor and efficiency of the motor, the number of pole pairs of the synchronous reluctance motor is selected as 2-3 is better . In the specific design, the number of pole pairs can be optimized by considering the rotational speed and the fundamental frequency.
Split ratioThe split ratio selection of synchronous reluctance motors is usually lower than that of permanent magnet synchronous motors . The specific split ratio design should also consider the number of pole pairs of the motor. The output torque of the synchronous reluctance motor is proportional to the product of the inner diameter of the stator and the square of the stator ampere-turn , so a larger slot area is required for the synchronous reluctance motor to place the armature. From the perspective of increasing torque density, the optimal split ratio of synchronous reluctance motor should be smaller than that of permanent magnet synchronous motor.The power factor of synchronous reluctance motor depends on the ratio of AC to DC axis inductance . Increasing the outer diameter of the rotor can increase the main inductance content in the inductance, thereby increasing the salient pole ratio of the motor. Therefore, from the perspective of increasing the power factor of the synchronous reluctance motor, the optimal split ratio should be relatively large; this is contradictory to the requirement of increasing the torque density, so comprehensive optimization is required.Choice of winding formConsidering the electromagnetic performance of the motor, the following requirements are put forward for the selection of the winding of the synchronous reluctance motor: ( 1) High torque densityThe average output torque of synchronous reluctance motor is proportional to the square of the fundamental winding coefficient , so the torque density is very sensitive to the fundamental winding coefficient. In order to obtain higher torque density, the winding structure requires a larger fundamental winding coefficient.( 2) Low torque rippleThe torque ripple of synchronous reluctance motor comes from the interaction of stator magnetomotive force and rotor magnetomotive force. For a synchronous reluctance motor with symmetrical rotor magnetic barriers, only odd harmonics exist in the rotor magnetomotive force . Therefore, weakening the odd harmonics in the magnetomotive force of the stator helps to reduce the torque ripple of the motor.(3) High power factorThe harmonic component in the stator magnetomotive force will increase the harmonic leakage inductance in the inductance , thereby reducing the salient pole ratio of the motor and reducing the power factor. In order to improve the power factor of the motor, all harmonics in the stator magnetomotive force should be weakened .( 4) Low iron consumptionThe harmonic component in the stator magnetomotive force rotates at a non-synchronous speed , and iron loss will be generated in both the stator and rotor cores. In order to reduce the iron loss of the motor, the harmonics in the magnetomotive force of the stator should be suppressed.( 5) Low copper consumptionThe synchronous reluctance motor has a low power factor and a large current , so the stator winding produces more copper loss. Appropriate use of short-pitch windings can shorten the length of the end and reduce the copper loss of the motor.Integer slot distributed windings (such as 4p12s, 4p24s, 6p18s, 6p36s...) are the most widely used in synchronous reluctance motors. Using a larger number of slots can increase the average torque, reduce torque ripple, and improve power factor and efficiency. Fractional slots (such as 4p18s, 4p30s, 6p27s, 6p45s...) distributed windings with an integer number of pole slots for each pair have been proposed by scholars in recent years. The torque ripple is low, and at the same time, a large power factor and efficiency can be obtained. Fractional slot windings (such as 4p9s, 4p15s, 4p21s...) with fractional number of pole slots for each pair of poles have the smallest torque ripple, but the motor iron consumption is larger and the efficiency is slightly lower. At the same time, the harmonic leakage inductance is large, so the power factor is slightly lower.The influence of processing and assembly errors Punching burrs will reduce the lamination coefficient of the motor core, thereby reducing the output torque of the motor; The local denaturation of the punched and trimmed material will reduce the magnetic permeability of the material and also reduce the output torque of the motor.For the self-studded motor, since there is no insulation on the cut edge of the buckle point, an additional conductive path is formed, thereby forming an eddy current and increasing the eddy current loss of the motor.During the riveting process of the rotor core , there may be angular misalignment of some stamping pieces. This random misalignment may reduce the effective output torque of the motor, but a small angular misalignment is beneficial to reduce the torque ripple of the motor.The eccentricity of stator and rotor assembly has little effect on the output torque of the motor, but it will increase the unilateral magnetic pull of the motor and increase the bearing load.

























 XINDA
XINDA